Contents
Abstract
Generating realistic human motion from natural language is a well-studied problem, but current state-of-the-art systems produce motion in a single expensive forward pass, making them too slow for interactive or online settings where the user needs to update constraints mid-execution. We present C-T2M, a controllable text-to-motion pipeline designed around speed and flexibility. The key idea is to decouple trajectory control from body motion generation: a small closed-loop GRU handles where the character goes, while an autoregressive Transformer over discrete motion tokens handles what it does. A deterministic recompose step blends the two at the end. Because the components are independent, path or text constraints can be updated mid-generation without restarting from scratch: the model re-uses the last few generated tokens as context and continues from the new condition. Our system runs at 413 ms per 200-frame clip, roughly 10× faster than Kimodo, and follows root XZ path constraints at 3.94 cm error versus Kimodo's 4.88 cm. We train on the BONES dataset, evaluate on both text-to-motion quality and constraint-following benchmarks, and include a systematic ablation of the main design choices.
1. Introduction
The current state of the art in text-to-motion is dominated by diffusion systems such as Kimodo, which produce high-fidelity human motion conditioned on free-form text and support a rich set of kinematic constraints (pose, joint trajectory, root path). Kimodo is trained on the BONES dataset, a large-scale motion-capture corpus roughly ten times larger than the commonly used HumanML3D benchmark, which enables much of that quality improvement.
Despite these advances, current state-of-the-art systems share a common limitation: they generate the entire motion clip in a single, expensive forward pass (typically requiring tens to hundreds of denoising steps). This makes them unsuitable for online settings, where the user wants to update waypoints, captions, or scene geometry mid-execution, and for interactive settings, where latency directly bounds usability. A robotics policy, a digital twin, or an interactive game character all need motion generation that reacts to changing input without recomputing everything from scratch.
1.1. Problem Statement
- Input: a free-form text caption and an optional root XZ path constraint (sparse waypoints or a dense trajectory).
- Output: frame-by-frame 3D joint positions of a humanoid skeleton that match both the caption and the path.
- Constraint following: path adherence comparable to a diffusion baseline of much higher capacity.
- Speed: fast enough to recompute or update the motion mid-rollout when the user changes the caption or path, without restarting from scratch.
- Motion quality: text alignment and foot-contact behaviour at a level acceptable for downstream use.
1.2. Contributions
- A decoupled architecture that separates trajectory control (a small GRU) from body motion generation (a Transformer over VQ-VAE tokens), connected by a deterministic recompose step.
- A closed-loop path controller trained with a travel-relative heading loss plus a still-frame target that fixes the spin-on-spot pathology common to absolute-heading parameterisations.
- An interrupt-and-re-generate online adaptation mechanism that allows text prompts and path constraints to be updated at any point during generation: the sequence is cut, the last few tokens are kept as warm-start context, and the model re-generates the remainder under the new condition, producing a smooth transition without restarting the rollout.
- A residual VQ-VAE (RVQ-VAE) that lifts reconstruction-side R-Precision by 9-12 points over a single VQ-VAE baseline, halves the reconstruction FID, and reduces foot-skating.
- A systematic ablation of constraint-conditioning architectures showing that our decoupled design dominates four end-to-end variants on every constraint-following metric we report.
- An evaluation against Kimodo on a 256-testcase path-following protocol, where our system reaches 3.94 cm 2D root error versus Kimodo's 4.88 cm at roughly 10× lower latency.
2. Related Work
Recent text-to-motion literature has been dominated by diffusion models (MDM, MotionDiffuse, FLAME, ReMoDiffuse), which synthesise high-fidelity human movement by iteratively denoising continuous latent representations. A key advantage of the diffusion formulation is its amenability to complex spatial and temporal conditioning. Frameworks such as Kimodo, OmniControl and PriorMDM leverage this capability to introduce fine-grained kinematic constraints, including end-effector trajectories, root paths, and keyframe poses, typically via guided denoising or latent inpainting. However, their reliance on multiple reverse diffusion steps incurs high inference latency, severely limiting their deployment in real-time, dynamic environments.
To overcome this latency bottleneck, a parallel line of research reformulates motion generation as a discrete sequence prediction task. T2M-GPT pioneered this approach by compressing continuous 3D motion into a discrete vocabulary via a VQ-VAE and using a causal Transformer to autoregressively predict motion tokens from text. This paradigm has inspired numerous variants, including MotionGPT for unified multimodal tasks and T2M-HiFiGPT for enhanced artifact reduction. Notably, while successors like MoMask achieve superior generation fidelity by employing masked bidirectional modelling, this non-causal iterative refinement process breaks the strict left-to-right generation required for online, streaming applications. Consequently, we select the strictly causal T2M-GPT architecture as our baseline and extend it with an explicit, decoupled path controller.
3. Method
At its core, text-to-motion predicts the 3D position of each joint of a humanoid skeleton, frame by frame, from a natural-language description. Our approach extends the T2M-GPT baseline with one key addition: an explicit path controller that lets the model follow spatial constraints, instead of leaving the trajectory entirely up to the language model. The pipeline consists of four blocks, summarised in Figure 1, that we describe in detail below.
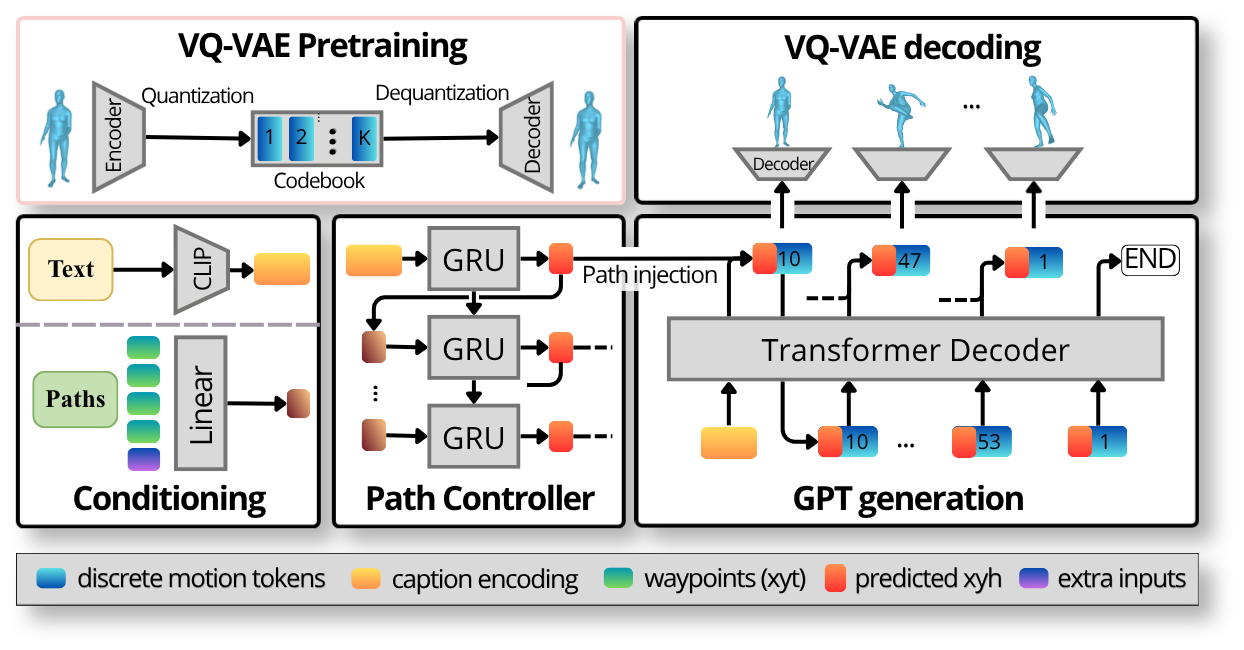
3.1. VQ-VAE Motion Codec
The body decoder is a temporal vector-quantised autoencoder (VQ-VAE). The encoder maps a window of raw motion features into a sequence of discrete tokens drawn from a learned codebook; the decoder reconstructs continuous motion from those tokens. The autoregressive language model is then trained to predict these tokens, so "predicting motion" is reduced to "predicting codebook indices". We use a codebook of 2048 entries, a 2x temporal downsampling rate, and a window size of 64 frames. The choice of compression rate is studied in Section 3.4 and on the Ablations page; 4x converges to the lowest reconstruction loss and the highest per-clip code diversity, while 2x retains a denser token stream that the autoregressive model benefits from.
3.2. Residual VQ-VAE (RVQ-VAE)
We additionally explore a residual VQ-VAE in which quantisation is performed at K hierarchical levels: at each level, the residual error left by the previous level is itself quantised by a dedicated codebook. The body language model is then adapted to predict K token streams per frame. We use K = 4 levels with 1024 codebook entries per level, trained with a cosine-weighted reconstruction loss that emphasises higher-frequency details at deeper levels. On the VQ-VAE reconstruction benchmark this lifts R-Precision by roughly 9 points on the Overview split and 12 points on the Timeline-multi split, halves the FID, and shaves about 6 cm/s off the foot-skating; full numbers are reported in the VQ-VAE reconstruction ablation.
3.3. Text and Path Conditioning
The caption is embedded by a frozen CLIP text encoder (ViT-B/32) into a single 512-dimensional vector. Path constraints are encoded by a small linear projection that takes, for each frame, the next four waypoints (x, y, t) expressed relative to the skeleton's current position, plus its absolute position and current frame index. This compact representation is shared between the path controller and the body GPT.
3.4. Path Controller
The path controller is a closed-loop GRU (about 2 M parameters) that takes the caption embedding and path conditioning features and predicts, for each frame of the rollout, the next root (x, y) position and a heading angle. It is trained to minimise the regression loss to the ground-truth waypoint trajectory, plus a heading-smoothness regulariser that removes per-frame jitter and an arrive-radius gating that prevents orbiting around the final waypoint. The heading parameterisation is travel-relative (turn rate w.r.t. the direction of motion) rather than absolute world-frame yaw; on still frames, where the travel direction is ill-defined, we add an explicit target-zero loss on the predicted turn rate, which fixes the spin-on-spot pathology that arises with the naive travel-relative formulation.
3.5. Body GPT
The body GPT is a causal Transformer decoder over the VQ-VAE token vocabulary. At each step it predicts the next motion token conditioned on (a) the CLIP caption embedding, (b) the path conditioning features at the current frame, and (c) the previously predicted tokens. We use a 9-layer decoder with embedding dimension 1024, 16 attention heads, a block size of 51 tokens, and a feed-forward expansion factor of 4. Because the trajectory is provided to the GPT through the path conditioning, the GPT is no longer in charge of global position: it is conditioned on it, and instead focuses on producing motion that is consistent with the chosen trajectory. Trajectory comes from the controller, naturalness from the GPT.
At inference time we sample tokens with a sliding window of size SW = 25. We use plain multinomial sampling rather than greedy, top-p, or top-k; the decoder ablation shows that multinomial is the only sampler whose body motion does not collapse to a held pose on a non-trivial fraction of captions.
3.6. Deterministic Recompose
Finally, a deterministic recompose step blends the body GPT's predicted motion onto the controller's trajectory. The GPT outputs a locally-coherent gait; the controller produces a globally-correct root trajectory. The recompose step warps the body's local frames so that the root XZ position matches the controller's rollout exactly, while leaving the limbs, heading, and vertical motion untouched. This keeps the body GPT decoupled from the global path: it does not need to memorise long-range path-following, the controller does. Because the recompose step is closed form, it adds negligible latency.
3.7. Online Adaptation
Because the body GPT is autoregressive, generation can be interrupted at any frame. To update the motion mid-sequence (with a new text prompt, a new path constraint, or both), we apply an interrupt-and-re-generate procedure: the sequence is cut at the chosen frame, the last K generated tokens are kept as context, and the model re-generates the remainder conditioned on the new input. The retained tokens act as a warm start, so the body transitions smoothly into the new condition rather than resetting abruptly. The same procedure applies to path updates: the controller re-rolls from the cut point with the new waypoints, and the body GPT follows from its warm-start context. End-to-end latency per 200-frame clip is 413 ms, making real-time updates feasible.
4. Experiments
We evaluate C-T2M against Kimodo on the BONES benchmark in two settings: standard text-to-motion (Section 4.2) and constraint following (Section 4.3). We then summarise the key ablations (Section 4.4), with full results on the Ablations page.
4.1. Setup
We train on the BONES dataset (full 127k clips). All quantitative results in this section use the BONES Repetition Text-to-Motion split (6,539 testcases), with held-out captions. We run stages 2-5 of the Kimodo benchmark pipeline (token decoding, motion synthesis, TMR text-encoder embedding, R-Precision and FID computation, and foot-skate scoring), so that all systems are evaluated by exactly the same downstream code. Latency is measured end-to-end on a single A100 80 GB GPU at fp32, batch size 1, 200-frame clip, averaged over 50 runs with 10 warm-ups.
4.2. Main Results (Text-to-Motion vs. Kimodo)
Table 1 reports the headline comparison on the Repetition Text-to-Motion split. Our system reaches R@3 = 58.66 on the Overview split, at 10× lower latency than Kimodo (413 ms vs. 4280 ms per clip) and 20× fewer effective parameters (395 M vs. 8.3 B). We accept a quality deficit on this generic-text benchmark, driven by a narrower training vocabulary and by a single autoregressive pass per clip instead of 100 denoising steps. The foot-skate gap reflects the ceiling of the frame-level discrete VQ-VAE; a Kimodo-style foot-contact re-projection step would close most of this gap and is left to future work.
| Model | Params (M) | Latency (ms/clip) ↓ | R@3 ↑ | FID ↓ | Skate ↓ | Cont ↑ |
|---|---|---|---|---|---|---|
| Ground Truth | – | – | 94.03 | 0.000 | 2.11 | 1.000 |
| Kimodo-SOMA-SEED-v1.1 | 8 300 | 4280 | 88.07 | 0.007 | 3.74 | 0.978 |
| Ours | 395 | 413 | 58.66 | 0.191 | 33.07 | 0.617 |
4.3. Constraint Following vs. Kimodo
On Kimodo's dedicated path-following split
(content/constraints_withtext/root/path_2dpos, 256
testcases), C-T2M reaches a 2D root error of 3.94 cm, slightly below
Kimodo's 4.88 cm on the same testcases under the same evaluator.
Root-accuracy (fraction of frames within 10 cm of the target path)
is 95.7 % for ours versus 93.4 % for Kimodo. Foot-skate and
contact consistency favour Kimodo, consistent with the VQ-VAE ceiling
discussed in Section 4.2.
| Model | 2D root error (cm) ↓ | Acc ≤ 10 cm ↑ | Foot skate ↓ | Contact ↑ |
|---|---|---|---|---|
| Ground truth (lower bound) | 3.76 | 1.000 | 0.103 | 1.000 |
| Kimodo-SOMA-SEED-v1.1 (DDIM 100) | 4.88 | 0.934 | 0.117 | 0.966 |
| Ours (decoupled) | 3.94 | 0.957 | 0.583 | 0.582 |
4.4. Ablations
The full set of ablation tables and qualitative comparisons lives on the Ablations page. The key findings are:
- Constraint-conditioning architecture. Our decoupled controller-and-recompose design dominates four end-to-end variants (static cross-attention, per-position relative cross-attention, prepend constraint tokens, body-GPT-without-constraint) on every constraint- following and quality metric, achieving roughly 2.5-4× lower root error and 2-3× higher motion-to-motion retrieval recall in a neutral encoder space.
- VQ-VAE temporal compression. 4× downsampling converges fastest and to the lowest reconstruction loss with the highest unique-codes-per-clip; 16× collapses on reconstruction.
- Codec reconstruction. RVQ-VAE retains roughly 88 % of ground-truth R@3 on the Overview split and 87 % on Timeline-multi, halves FID, and reduces foot-skate compared to a single VQ-VAE baseline.
- Body decoder sampler. Multinomial sampling dominates greedy, top-p, top-k, and top-p-with- repetition-penalty on every motion-quality metric and is the only sampler that never collapses to a held pose.
4.5. Qualitative Results
Beyond the quantitative tables, we report a representative set of qualitative samples. All captions are held out from training.
4.5.1 Free text-to-motion samples
Free-generation samples from our body GPT on held-out captions. Each clip is produced from the caption alone, with no path constraint, so what you see is the model interpreting the text without any spatial guidance.
“a person executes a front flip with a smooth landing”
“high jump over a moving pole in one place”
“lively charleston dance with a forward leg kick”
“a neutral throw and release of a ball”
Figure 2. Free text-to-motion samples on held-out captions.
4.5.2 Model comparison: Kimodo vs. RVQ-GPT vs. VQ-GPT
Side-by-side comparison of three text-to-motion models on the same held-out captions. Kimodo is a diffusion-based baseline (state-of-the-art quality, slow); VQ-GPT is our single-codebook autoregressive model; RVQ-GPT is our residual-quantisation variant.
4.5.3 Constraint following
Walking along several user-specified XZ paths. The GRU controller rolls out the trajectory; the body GPT supplies the gait; the recompose step stitches them together. The same body GPT handles sparse waypoints, dense trajectories, and curves without retraining.
Dense spiral path.
Wavy dense trajectory.
Sparse waypoints, right arc.
Single diagonal waypoint.
Figure 5. Path-following samples with varying constraint densities.
4.5.4 Online adaptation
Because trajectory and body are decoupled, the path can be edited mid rollout without restarting generation. The controller absorbs the new waypoints immediately and the body GPT continues synthesizing motion along the updated trajectory.
User redraws the path mid-rollout.
A* planned path around obstacles.
Figure 6. Online adaptation: the controller responds to waypoint edits in real time without re-running the body generator.
4.5.5 Fine-grained prompts
We probe how much of the text actually makes it into the motion with two complementary experiments. The sequential-prompts experiment on the home page tests captions that chain actions in time (do X, and then Y): up to Level 3 the motion follows the caption, but from Level 4 onwards the “and then” structure is lost. The simultaneous-prompts ablation tests the other direction (do X while doing Y): each action is generated correctly on its own, but combined in one caption the secondary ones (nodding, arm-raising) fade while the salient ones (walking, waving) dominate. Same takeaway in both directions: text is a lossy representation of motion when one caption tries to encode either an explicit temporal sequence or multiple simultaneous actions.
5. Conclusion & Limitations
C-T2M shows that decoupling trajectory control from body motion generation is an effective strategy for fast, controllable text-to-motion. A small GRU handles where the character goes; an autoregressive Transformer handles what it does; a deterministic recompose step combines them. The result beats Kimodo on path adherence (3.94 cm vs. 4.88 cm) at roughly 10× lower latency and twenty times fewer parameters. Because generation is autoregressive and the components are independent, the pipeline also supports online adaptation: text and path constraints can be swapped mid-sequence with smooth transitions, without restarting from scratch.
Limitations and future work
- Foot skating. The body decoder inherits the foot-skating ceiling of a frame-level discrete VQ-VAE. A foot re-projection post-processing step (as used by Kimodo) would close most of the gap and is left to future work.
- Constraint types. The recompose step assumes a planar floor and a single root XZ trajectory. It does not yet generalise to end-effector or full-body keyframe constraints.
- Controller latency. The path controller accounts for roughly half of end-to-end latency. A learned feed-forward controller could replace the closed-loop GRU and remove the largest single bottleneck.
- Text fidelity. The model handles simple captions well but drops fine-grained details when several simultaneous actions are combined in one prompt, as shown by the fine-grained ablation.
6. Individual Contributions
- Maria Pilligua: ran the initial experiments to replicate T2M-GPT and preprocessed the BONES dataset (multiple times, with different pipelines). Prepared the model and dataloaders to retrain on the Kimodo benchmark. Trained the VQ-VAE at both small and large scale, trained our main model, and explored several architectures for injecting constraints before arriving at and training our current decoupled design. Rendered all visuals shown on the page (except the online-adaptation demos) and designed every architecture figure. Designed and ran all ablations and evaluations reported here. Consistently pushed for results, kept the meetings on track, and helped organise the team.
- Pau Amargant: developed the RVQ-VAE and the GPT-RVQ-VAE end-to-end variant, tuned the VQ-VAE, and contributed to model evaluation.
- Miquel Lopez: designed and implemented the data preprocessing pipeline, and set up the initial training pipeline for the VQ-VAE and the body GPT. Attempted to train a full constraint model supporting root-path, joint, and end-keypoint-frame constraints (unsuccessful). Ran the heavy-compute training jobs. Designed and implemented the online-adaptation architecture and produced the online-adaptation demos.
- Nahush Rajesh Kolhe: Implemented the data preparation and training scripts for the larger model. Designed and implemented online generation with text input injected mid-generation, using a streaming generator to render the motion live. Built the visualisation and the demo for online generation.
7. References
- J. Zhang et al. T2M-GPT: Generating Human Motion from Textual Descriptions with Discrete Representations. CVPR, 2023. arXiv:2301.06052
- C. Guo et al. MoMask: Generative Masked Modeling of 3D Human Motions. CVPR, 2024. arXiv:2312.00063
- G. Tevet et al. Human Motion Diffusion Model. ICLR, 2023. OpenReview
- M. Zhang et al. MotionDiffuse: Text-Driven Human Motion Generation with Diffusion Model. 2022. arXiv:2208.15001
- B. Jiang et al. MotionGPT: Human Motion as a Foreign Language. NeurIPS, 2023. arXiv:2306.14795
- Y. Xie et al. OmniControl: Control Any Joint at Any Time for Human Motion Generation. project page
- Y. Shafir et al. Human Motion Diffusion as a Generative Prior. project page
- C. Guo et al. Generating Diverse and Natural 3D Human Motions from Text. CVPR, 2022. (HumanML3D dataset.) project page
- NVIDIA. Kimodo: Foundation Model for Human Motion. Tech report, 2026. project page
- A. Radford et al. Learning Transferable Visual Models from Natural Language Supervision. ICML, 2021. (CLIP.) arXiv:2103.00020
BibTeX
@misc{ct2m2026,
title = {Controllable Autoregressive Text-to-Motion Generation},
author = {Amargant, Pau and Lopez, Miquel and Pilligua, Maria and Kolhe, Nahush Rajesh},
year = {2026},
note = {CS-503 Project, EPFL},
}